
Sorry, but you are looking for something that isn't here.
-
-
From the Archives
- FILLMORE CLASSICS
- Alta Plaza Park
- Art of the Fillmore
- Big Alma’s museum
- Bill Graham & the Fillmore
- Cable car to Pacific Hts
- Donut Hole Stories
- Fabulous Fillamento
- Fifty years on Fillmore
- Fillmore in the ’70s
- Fillmore Phil: a good egg
- Fillmore: forever new
- Filmed in Pacific Hts
- Five Fillmore stories
- From Jimbo’s to Yoshi’s
- Harlem of the West
- Jewish Fillmore
- KQED: “The Fillmore”
- La Med: a local gem
- Lafayette Park
- Leon: king of barbecue
- Life in the express line
- Magic at 1300 Fillmore
- Mary Ellen Pleasant’s legendary life
- Mayor of Fillmore
- Minnie’s Can-Do Club
- Peoples Temple
- Shumate’s Pharmacies
- Sugar’s Broiler
- Vivande’s discovery
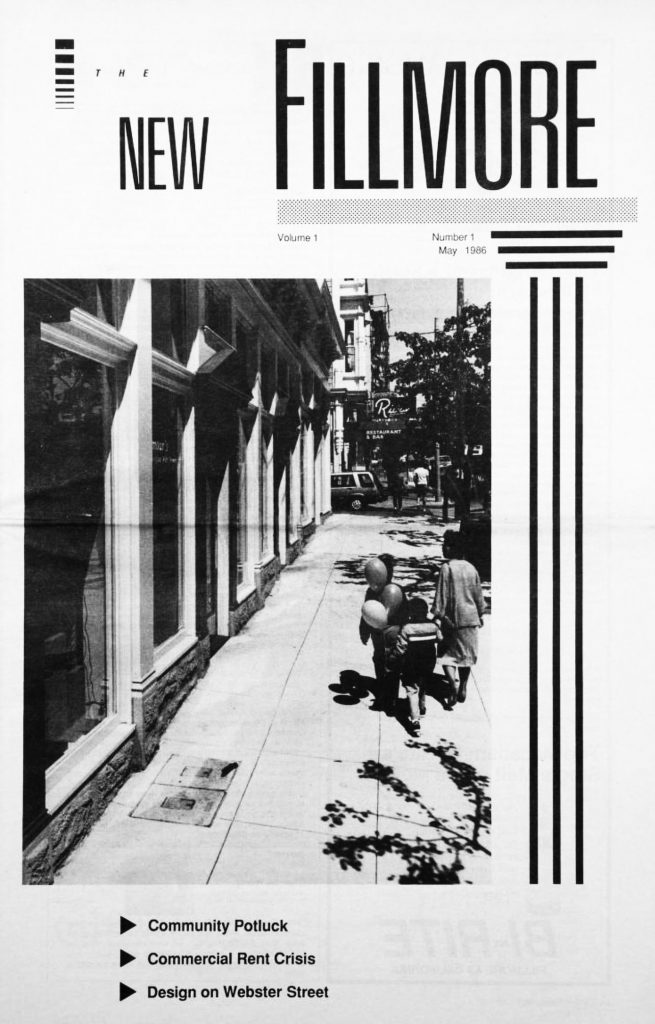
- Vol. 1, No. 1
- Western Addition
- FILLMORE CLASSICS
Meta
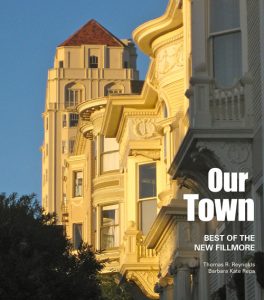
OUR BOOK
-
THIS LAVISH oversized limited edition book brings together a collection of favorite photographs and stories from the pages of the New Fillmore. It tells the story of an ever-changing small town in the big city with a rich history and a strong sense of community.
Available exclusively at Browser Books on Fillmore, or order online.
REVIEW: “A love letter“
OUR FILM
-
THIS DOCUMENTARY — filmed entirely on Fillmore Street — tells the story of longtime Fillmore resident Kelly Johnson, who used a new California law to end his life on his own terms.
MORE: “The final days of Kelly Johnson“
Categories